1065 User Guide: Difference between revisions
(→Events) |
|||
| Line 195: | Line 195: | ||
::'''ErrorCode <nowiki>=</nowiki> EEPHIDGET_BADPOWER''' - The supply voltage is too low or too high. This is thrown if the voltage is <nowiki><=7V, or >=34V</nowiki>. There are several different messages depending on how far out of spec the voltage is. Quick load/velocity changes can cause spike in the supply voltage - if these spikes exceed 40V, the motor is automatically placed in 100% braking - braking ends when the supply voltage falls to <38V. When error states have ended, there will be an error event with the EEPHIDGET_OK code.See the ErrorDescription string for specific error details. | ::'''ErrorCode <nowiki>=</nowiki> EEPHIDGET_BADPOWER''' - The supply voltage is too low or too high. This is thrown if the voltage is <nowiki><=7V, or >=34V</nowiki>. There are several different messages depending on how far out of spec the voltage is. Quick load/velocity changes can cause spike in the supply voltage - if these spikes exceed 40V, the motor is automatically placed in 100% braking - braking ends when the supply voltage falls to <38V. When error states have ended, there will be an error event with the EEPHIDGET_OK code.See the ErrorDescription string for specific error details. | ||
}} | }} | ||
<span style="color:#ff0000">'''C and .NET based APIs only:'''</span> | |||
{{UGapi|OnIndexChange(int EncoderIndex, int IndexPosition) [event] | |||
|An event that is issued whenever there is a pulse on the index pin. (Note: Many encoders do not support the index channel and leave the index pin unconnected) | |||
}} | |||
==Product History== | ==Product History== | ||
{{UGhist}} | {{UGhist}} | ||
{{UGrow|June 2011|0|100|Product Release}} | {{UGrow|June 2011|0|100|Product Release}} | ||
{{UGrow|June 2011|0|101|getLabelString fixed for labels longer than 7 characters}} | {{UGrow|June 2011|0|101|getLabelString fixed for labels longer than 7 characters}} | ||
Revision as of 16:16, 28 February 2013
| |
| Go to this device's product page |
Getting Started
Checking the Contents
|
You should have received:
|
In order to test your new Phidget you will also need:
| |
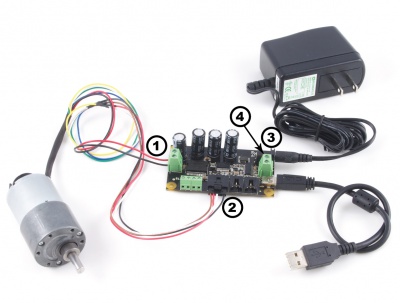
Connecting the Pieces
|
| |
Testing Using Windows 2000 / XP / Vista / 7
Make sure you have the current version of the Phidget library installed on your PC. If you don't, follow these steps:
- Go to the Quick Downloads section on the Windows page
- Download and run the Phidget21 Installer (32-bit, or 64-bit, depending on your system)
- You should see the
 icon on the right hand corner of the Task Bar.
icon on the right hand corner of the Task Bar.
Running Phidgets Sample Program
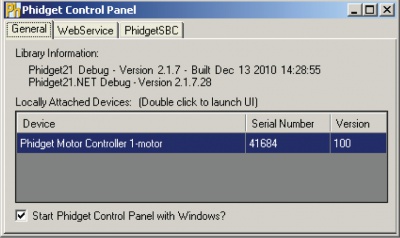
Double clicking on the ![]() icon loads the Phidget Control Panel; we will use this program to ensure that your new Phidget works properly.
icon loads the Phidget Control Panel; we will use this program to ensure that your new Phidget works properly.
The source code for the MotorControl-full sample program can be found in the quick downloads section on the C# Language Page. If you'd like to see examples in other languages, you can visit our Languages page.
Updating Device Firmware
If an entry in this list is red, it means the firmware for that device is out of date. Double click on the entry to be given the option of updating the firmware. If you choose not to update the firmware, you can still run the example for that device after refusing.
|
Double Click on the |
| |
|
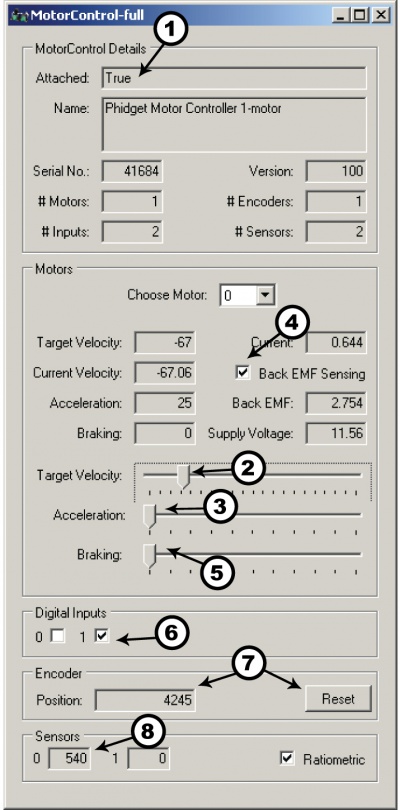
|
Testing Using Mac OS X
- Go to the Quick Downloads section on the Mac OS X page
- Download and run the Phidget OS X Installer
- Click on System Preferences >> Phidgets (under Other) to activate the Preference Pane
- Make sure that the Phidget MorotControl 1-Motor is properly attached.
- Double Click on Phidget MorotControl 1-Motor in the Phidget Preference Pane to bring up the MotorControl-full Sample program. This program will function in a similar way as the Windows version.
Using Linux
For a step-by-step guide on getting Phidgets running on Linux, check the Linux page.
Using Windows Mobile / CE 5.0 / CE 6.0
Technical Details
For more information on the analog inputs on the 1065, check the Analog Input Primer.
For more information about encoders, check the Encoder Primer.
For more information about DC motors and how to control them, check the DC Motor and Controller Primer.
API
Functions
Events
C and .NET based APIs only: