1064 User Guide: Difference between revisions
No edit summary |
No edit summary |
||
| (24 intermediate revisions by 3 users not shown) | |||
| Line 1: | Line 1: | ||
__NOINDEX__ | |||
<metadesc>Control up to two DC motors with this controller. Monitors surges and overheating in the API and connects to a USB port.</metadesc> | |||
[[Category:UserGuide]] | [[Category:UserGuide]] | ||
==Getting Started== | ==Getting Started== | ||
{{UGIntro|1064}} | |||
*[{{SERVER}}/products.php?product_id=1064 1064 PhidgetMotorControl HC] | |||
*USB cable and computer | |||
*{{CT|PowerSupply|Power supply}} | |||
*{{CT|DCM|DC Motor}} | |||
||}} | Next, you will need to connect the pieces: | ||
[[Image:1064_1_Connecting_The_Hardware.jpg|500px|right|link=]] | |||
# Connect the motor to one of the PhidgetMotorControl's outputs. | |||
# Connect the power supply to the terminal block on the board. | |||
# Connec the Phidget to your computer using the USB cable. | |||
<br clear="all"> | |||
{{UGIntroDone|1064}} | |||
== | ==Using the 1064== | ||
{{ | {{UGcontrolpanel|1064}} | ||
{{ugDCMotor|1064|DC Motor Controller}} | |||
{{ | {{ugCurrentInput|1064|, labelled ''DC Motor Current Sensor'', }} | ||
{{ugAddressingInformation}} | |||
{{ | {{ugUsingYourOwnProgram|1064}} | ||
==Technical Details== | ==Technical Details== | ||
For more information about DC motors and how to control them, check the [[DC Motor and Controller Guide]]. | |||
{{UGnext|}} | |||
{{ | |||
Latest revision as of 19:57, 1 June 2023
Getting Started
Welcome to the 1064 user guide! In order to get started, make sure you have the following hardware on hand:
- 1064 PhidgetMotorControl HC
- USB cable and computer
- Power supply
- DC Motor
Next, you will need to connect the pieces:
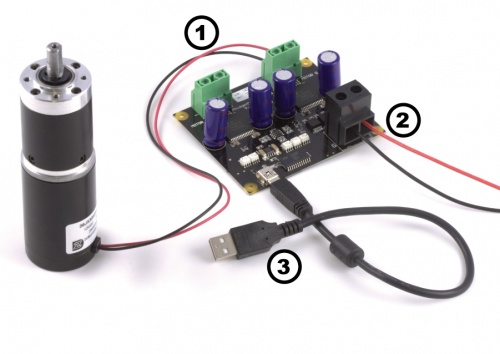
- Connect the motor to one of the PhidgetMotorControl's outputs.
- Connect the power supply to the terminal block on the board.
- Connec the Phidget to your computer using the USB cable.
Now that you have everything together, let's start using the 1064!
Using the 1064
Phidget Control Panel
In order to demonstrate the functionality of the 1064, the Phidget Control Panel running on a Windows machine will be used.
The Phidget Control Panel is available for use on both macOS and Windows machines.
Windows
To open the Phidget Control Panel on Windows, find the ![]() icon in the taskbar. If it is not there, open up the start menu and search for Phidget Control Panel
icon in the taskbar. If it is not there, open up the start menu and search for Phidget Control Panel
macOS
To open the Phidget Control Panel on macOS, open Finder and navigate to the Phidget Control Panel in the Applications list. Double click on the ![]() icon to bring up the Phidget Control Panel.
icon to bring up the Phidget Control Panel.
For more information, take a look at the getting started guide for your operating system:
Linux users can follow the getting started with Linux guide and continue reading here for more information about the 1064.
First Look
After plugging the 1064 into your computer and opening the Phidget Control Panel, you will see something like this:
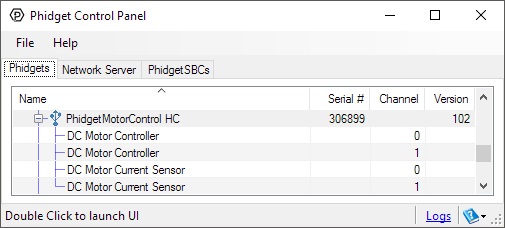
The Phidget Control Panel will list all connected Phidgets and associated objects, as well as the following information:
- Serial number: allows you to differentiate between similar Phidgets.
- Channel: allows you to differentiate between similar objects on a Phidget.
- Version number: corresponds to the firmware version your Phidget is running. If your Phidget is listed in red, your firmware is out of date. Update the firmware by double-clicking the entry.
The Phidget Control Panel can also be used to test your device. Double-clicking on an object will open an example.
DC Motor
Double-click on the DC Motor object, labelled DC Motor Controller, in order to run the example:

General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
- Toggle the BackEMF Sensing checkbox to enable/disable back-EMF sensing on the 1064.
- Drag the Target Velocity slider from -1 (full reverse) to 1 (full forward) to make the motor move.
- Manipulate the Acceleration slider to increase/decrease the amount of time it takes the DC Motor to reach a target velocity.
Current Input
Double-click on the Current Input object , labelled DC Motor Current Sensor, in order to run the example:
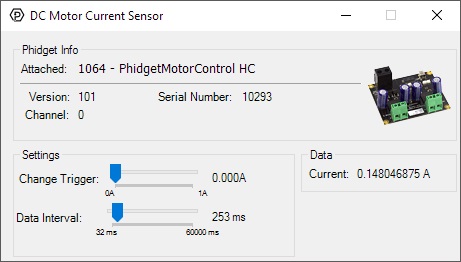
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
- Modify the change trigger and/or data interval value by dragging the sliders. For more information on these settings, see the data interval/change trigger page.
Finding The Addressing Information
Before you can access the device in your own code, and from our examples, you'll need to take note of the addressing parameters for your Phidget. These will indicate how the Phidget is physically connected to your application. For simplicity, these parameters can be found by clicking the button at the top of the Control Panel example for that Phidget.

In the Addressing Information window, the section above the line displays information you will need to connect to your Phidget from any application. In particular, note the Channel Class field as this will be the API you will need to use with your Phidget, and the type of example you should use to get started with it. The section below the line provides information about the network the Phidget is connected on if it is attached remotely. Keep track of these parameters moving forward, as you will need them once you start running our examples or your own code.

Using Your Own Program
You are now ready to start writing your own code for the device. The best way to do that is to start from our Code Samples.
Select your programming language of choice from the drop-down list to get an example for your device. You can use the options provided to further customize the example to best suit your needs.
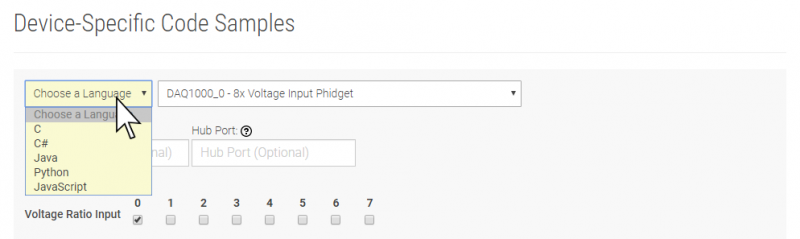
Once you have your example, you will need to follow the instructions on the page for your programming language to get it running. To find these instructions, select your programming language from the Programming Languages page.
Technical Details
For more information about DC motors and how to control them, check the DC Motor and Controller Guide.
What to do Next
- Programming Languages - Find your preferred programming language here and learn how to write your own code with Phidgets!
- Phidget Programming Basics - Once you have set up Phidgets to work with your programming environment, we recommend you read our page on to learn the fundamentals of programming with Phidgets.