1128 User Guide: Difference between revisions
No edit summary |
No edit summary |
||
| Line 1: | Line 1: | ||
[[Category:UserGuide]] | [[Category:UserGuide]] | ||
==Getting Started== | |||
{{UgSensorIntro|1128|MaxBotix EZ-1 Sonar Sensor|Voltage Ratio Input port and optionally a Digital Output port (for turning sensor on/off)}} | |||
Next, you will need to connect the pieces: | |||
[[Image:1128_0_Connecting_The_Hardware.jpg|400px|right|link=]] | [[Image:1128_0_Connecting_The_Hardware.jpg|400px|right|link=]] | ||
{| class ="wikitable" | |||
| align="center" style="background:#f0f0f0;"|'''Black Wire''' | |||
| align="center" style="background:#f0f0f0;"|'''Red Wire''' | |||
| align="center" style="background:#f0f0f0;"|'''White Wire''' | |||
| align="center" style="background:#f0f0f0;"|'''Fourth Wire''' | |||
|- | |||
|align=center| GND | |||
|align=center| +5 | |||
|align=center| AN | |||
|align=center| RX (optional) | |||
|} | |||
# Connect the | # Connect the 1128 to the 1018 with the Phidget cable. | ||
# If you're using the fourth wire, connect it to a digital output port on the | # If you're using the fourth wire, connect it to a digital output port on the 1018. | ||
# Connect the | # Connect the 1018 to your computer with the USB cable. | ||
<br clear="all"> | <br clear="all"> | ||
== | {{UGIntroDone|1128}} | ||
==Using the 1128== | |||
{{UGcontrolpanelSensor|1128|1018}} | |||
{{UGSensorVoltageRatioInput|1128|distance}} | |||
{{ | {{UGSensorDigitalOutput|This will turn the sensor on/off if you have connected RX to the digital output.}} | ||
==Technical Details== | ==Technical Details== | ||
The Sonar Sensor is manufactured by | ===Sonar Sensor=== | ||
The Sonar Sensor is manufactured by [http://maxbotix.com/ MaxBotix]. We have added a Phidget cable and instructions on soldering the cable to the sensor. The 1128 is Ratiometric. Ensure you are using the Voltage Ratio object.Each time the LV-MaxSonar®-EZ1™ is powered up, it will calibrate during its first read cycle. The sensor uses this stored information to range a close object. It is important that objects not be close to the sensor during this calibration cycle. The best sensitivity is obtained when it is clear for fourteen inches, but good results are common when clear for at least seven inches. If an object is too close during the calibration cycle, the sensor may then ignore objects at that distance. The LV-MaxSonar®-EZ1™ does not use the calibration data to temperature compensate for range, but instead to compensate for the sensor ringdown pattern. If the temperature, humidity, or applied voltage changes during operation, the sensor may require recalibration to reacquire the ringdown pattern. Unless recalibrated, if the temperature increases, the sensor is more likely to have false close readings. If the temperature decreases, the sensor is more likely to have reduced upclose sensitivity. To recalibrate the LV-MaxSonar®-EZ1™, cycle power. For more complete specifications on the MaxSonar-EZ1, please visit [http://maxbotix.com/ MaxBotix]. | |||
===Interference=== | ===Interference=== | ||
Since the beam width is fairly large and sound tends to reflect more than light, sonar sensors will interfere with one another if more than one is active in a sensor array. | Since the beam width is fairly large and sound tends to reflect more than light, sonar sensors will interfere with one another if more than one is active in a sensor array. To avoid interference we recommend that you poll each sensor individually and only activate the specific sensor you are polling. That way you can activate one sensor, read the distance, and then deactivate it before moving to the next sensor. This will give you clean results. Perhaps the easiest way to achieve this is to take the power line from the sensor and connect it to a digital output of your 1018 (or [{{SERVER}}/?view=comparetable&rel=Analog%20Inputs compatible product]) instead of the normal analog input power pin. This will allow you to toggle the power to the device and turn it on or off at will. | ||
===Formulas=== | ===Formulas=== | ||
The formula to translate voltage from the sensor to | {{UGSensorFormula|distance}} The formula to translate voltage from the sensor to distance is: | ||
| Line 35: | Line 46: | ||
\text{Distance (cm)} = \text{Voltage} \times 259.2 | \text{Distance (cm)} = \text{Voltage} \times 259.2 | ||
</math> | </math> | ||
<br clear="all"> | |||
{{UGasens}} | {{UGasens}} | ||
{{UGnext|}} | {{UGnext|}} | ||
Revision as of 20:05, 16 June 2017
Getting Started
Welcome to the 1128 user guide! In order to get started, make sure you have the following hardware on hand:
- 1128 - MaxBotix EZ-1 Sonar Sensor
- Any Phidget with a Voltage Ratio Input port and optionally a Digital Output port (for turning sensor on/off), here are some compatible products. We will be using the VINT Hub for this guide.
- USB cable and computer
- Phidget cable
Next, you will need to connect the pieces:
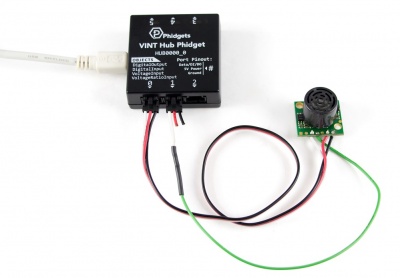
| Black Wire | Red Wire | White Wire | Fourth Wire |
| GND | +5 | AN | RX (optional) |
- Connect the 1128 to the 1018 with the Phidget cable.
- If you're using the fourth wire, connect it to a digital output port on the 1018.
- Connect the 1018 to your computer with the USB cable.
Now that you have everything together, let's start using the 1128!
Using the 1128
Phidget Control Panel
In order to demonstrate the functionality of the 1128, we will connect it to the 1018, and then run an example using the Phidget Control Panel on a Windows machine.
The Phidget Control Panel is available for use on both macOS and Windows machines. If you would like to follow along, first take a look at the getting started guide for your operating system:
Linux users can follow the getting started with Linux guide and continue reading here for more information about the 1128.
First Look
After plugging in the 1128 into the 1018, and the 1018 into your computer, open the Phidget Control Panel. You will see something like this:
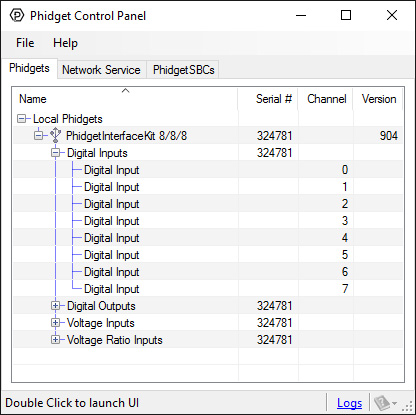
The Phidget Control Panel will list all connected Phidgets and associated objects, as well as the following information:
- Serial number: allows you to differentiate between similar Phidgets.
- Channel: allows you to differentiate between similar objects on a Phidget.
- Version number: corresponds to the firmware version your Phidget is running. If your Phidget is listed in red, your firmware is out of date. Update the firmware by double-clicking the entry.
The Phidget Control Panel can also be used to test your device. Double-clicking on an object will open an example.
Voltage Ratio Input
Double-click on a Voltage Ratio Input object in order to run the example:
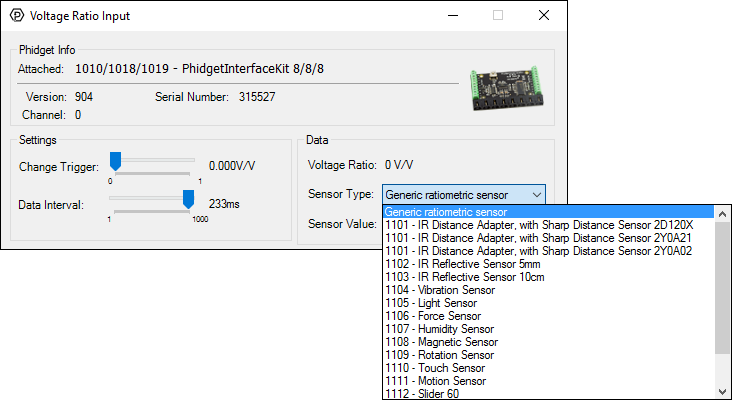
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
- Modify the change trigger and/or data interval value by dragging the sliders. For more information on these settings, see the data interval/change trigger page.
- Select the 1128 from the Sensor Type drop-down menu. The example will now convert the voltage into distance automatically. Converting the voltage to distance is not specific to this example, it is handled by the Phidget libraries, with functions you have access to when you begin developing!
Digital Output
Double-click on a Digital Output object in order to run the example:
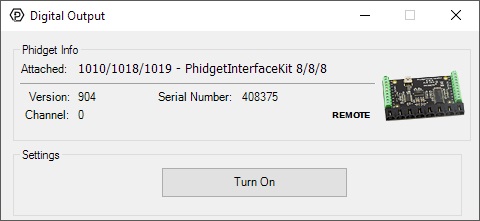
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
- Toggle the state of the digital output by pressing the button. This will turn the sensor on/off if you have connected RX to the digital output.
Technical Details
Sonar Sensor
The Sonar Sensor is manufactured by MaxBotix. We have added a Phidget cable and instructions on soldering the cable to the sensor. The 1128 is Ratiometric. Ensure you are using the Voltage Ratio object.Each time the LV-MaxSonar®-EZ1™ is powered up, it will calibrate during its first read cycle. The sensor uses this stored information to range a close object. It is important that objects not be close to the sensor during this calibration cycle. The best sensitivity is obtained when it is clear for fourteen inches, but good results are common when clear for at least seven inches. If an object is too close during the calibration cycle, the sensor may then ignore objects at that distance. The LV-MaxSonar®-EZ1™ does not use the calibration data to temperature compensate for range, but instead to compensate for the sensor ringdown pattern. If the temperature, humidity, or applied voltage changes during operation, the sensor may require recalibration to reacquire the ringdown pattern. Unless recalibrated, if the temperature increases, the sensor is more likely to have false close readings. If the temperature decreases, the sensor is more likely to have reduced upclose sensitivity. To recalibrate the LV-MaxSonar®-EZ1™, cycle power. For more complete specifications on the MaxSonar-EZ1, please visit MaxBotix.
Interference
Since the beam width is fairly large and sound tends to reflect more than light, sonar sensors will interfere with one another if more than one is active in a sensor array. To avoid interference we recommend that you poll each sensor individually and only activate the specific sensor you are polling. That way you can activate one sensor, read the distance, and then deactivate it before moving to the next sensor. This will give you clean results. Perhaps the easiest way to achieve this is to take the power line from the sensor and connect it to a digital output of your 1018 (or compatible product) instead of the normal analog input power pin. This will allow you to toggle the power to the device and turn it on or off at will.
Formulas
The Phidget libraries can automatically convert sensor voltage into distance by selecting the appropriate SensorType. See the Phidget22 API for more details. The formula to translate voltage from the sensor to distance is:

Phidget Cable
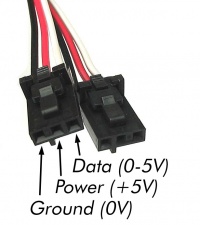
The Phidget Cable is a 3-pin, 0.100 inch pitch locking connector. Pictured here is a plug with the connections labelled. The connectors are commonly available - refer to the Analog Input Primer for manufacturer part numbers.
What to do Next
- Programming Languages - Find your preferred programming language here and learn how to write your own code with Phidgets!
- Phidget Programming Basics - Once you have set up Phidgets to work with your programming environment, we recommend you read our page on to learn the fundamentals of programming with Phidgets.