Position Controller Tuning Guide
Motion Profiling
Trapezoidal motion profiling combined with a proportional-integral-derivative (PID) controller is used in order to accurately track position. This allows for advanced control and improved repeatability of your system.
How It Works
Trapezoidal motion profiling is named for the trapezoidal shape of the Velocity-Time graph (shown below in orange).
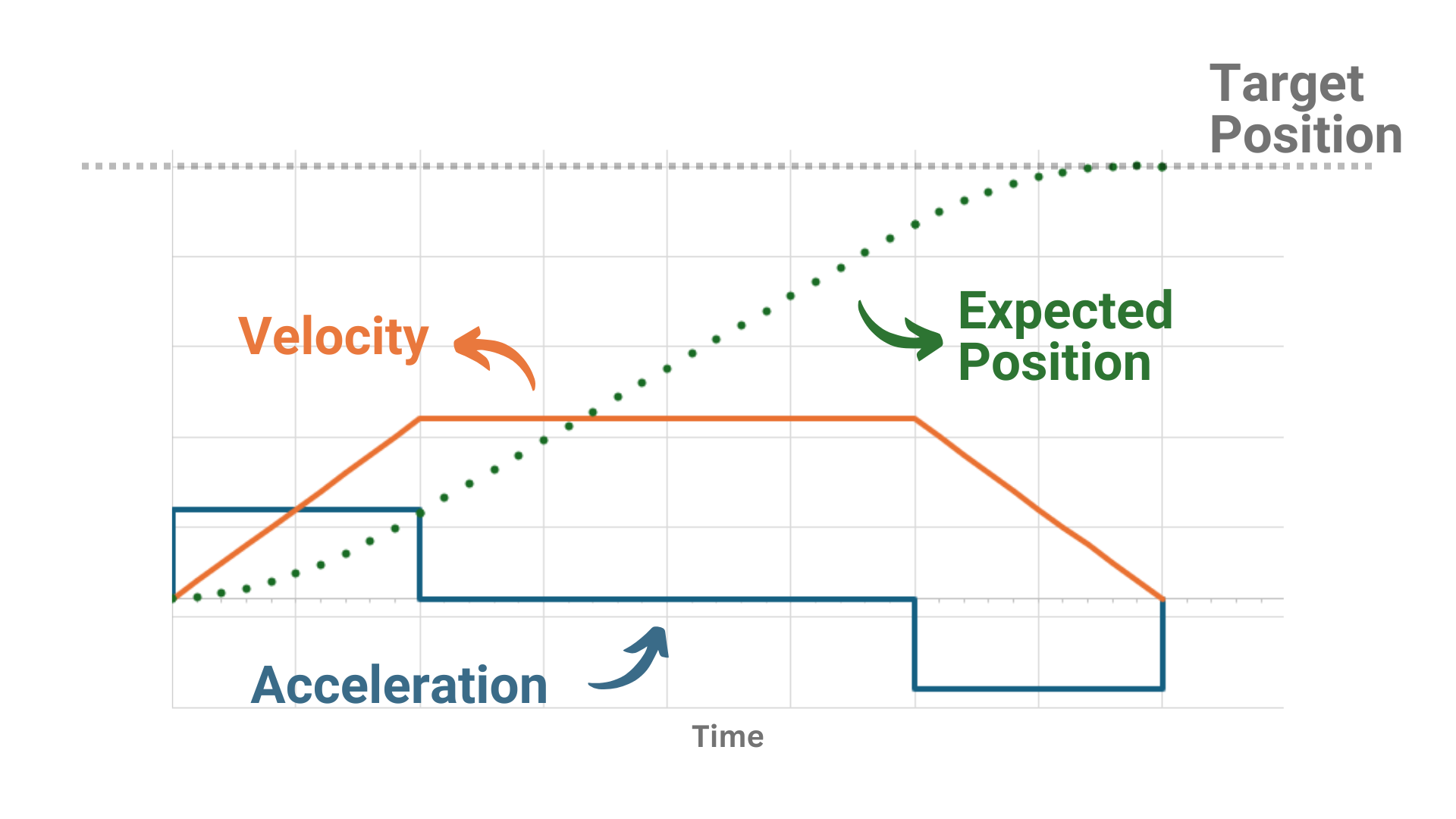
Unlike traditional PID loops where a target is set and the controller approaches (often aggressively), Phidget position controllers will intelligently plot a series of target positions between the current and desired position, following the user-specified acceleration and velocity limit. A PID loop is then employed to precisely follow this trajectory, ensuring smooth and controlled motion.
Tuning Video
The Phidget Control Panel on Windows features a built-in tuning application for Position Controllers. This application makes it easy to experimentally determine the best control parameters for your motor system.
Once tuning is complete, you can save the parameters to a file for later use with the Phidget Control Panel or set the values directly in your program's attachment handler.