|
Notice: This page contains information for the legacy Phidget21 Library. Phidget21 is out of support. Bugfixes may be considered on a case by case basis. Phidget21 does not support VINT Phidgets, or new USB Phidgets released after 2020. We maintain a selection of legacy devices for sale that are supported in Phidget21. We recommend that new projects be developed against the Phidget22 Library.
|
1128 User Guide: Difference between revisions
No edit summary |
|||
| (24 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
__NOINDEX__ | |||
[[Category:UserGuide]] | |||
{{UserguideTOC|1128.jpg|1128}} | |||
==Getting Started== | ==Getting Started== | ||
| Line 18: | Line 21: | ||
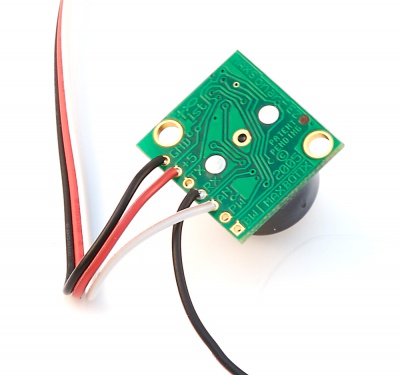
Solder one end of the sensor cable to the Sonar Sensor. The black wire is soldered to GND, the red wire to +5 and the white wire to AN. Optionally a fourth wire can be soldered to RX in order to turn the sensor on and off from your computer. | Solder one end of the sensor cable to the Sonar Sensor. The black wire is soldered to GND, the red wire to +5 and the white wire to AN. Optionally a fourth wire can be soldered to RX in order to turn the sensor on and off from your computer. | ||
| | | | ||
[[File: | [[File:1128_0_Wiring.jpg|400px|link=]]|| | ||
}} | }} | ||
| Line 85: | Line 88: | ||
==Technical Details== | ==Technical Details== | ||
The Sonar Sensor is manufactured by Maxbotix.com. We have added a sensor cable and instructions on soldering the cable to the sensor. The Sonar Sensor is Ratiometric. Make sure that the ratiometric property is set to TRUE when programming the sensor. Each time after the LV-MaxSonar®-EZ1™ is powered up, it will calibrate during its first read cycle. The sensor uses this stored information to range a close object. It is important that objects not be close to the sensor during this calibration cycle. The best sensitivity is obtained when it is clear for fourteen inches, but good results are common when clear for at least seven inches. If an object is too close during the calibration cycle, the sensor may then ignore objects at that distance. The LV-MaxSonar®-EZ1™ does not use the calibration data to temperature compensate for range, but instead to compensate for the sensor ringdown pattern. If the temperature, humidity, or applied voltage changes during operation, the sensor may require recalibration to reacquire the ringdown pattern. Unless recalibrated, if the temperature increases, the sensor is more likely to have false close readings. If the temperature decreases, the sensor is more likely to have reduced upclose sensitivity. To recalibrate the LV-MaxSonar®-EZ1™, cycle power. For more complete specifications on the MaxSonar-EZ1, please visit www.maxbotix.com | The Sonar Sensor is manufactured by Maxbotix.com. We have added a sensor cable and instructions on soldering the cable to the sensor. The Sonar Sensor is Ratiometric. Make sure that the ratiometric property is set to TRUE when programming the sensor. Each time after the LV-MaxSonar®-EZ1™ is powered up, it will calibrate during its first read cycle. The sensor uses this stored information to range a close object. It is important that objects not be close to the sensor during this calibration cycle. The best sensitivity is obtained when it is clear for fourteen inches, but good results are common when clear for at least seven inches. If an object is too close during the calibration cycle, the sensor may then ignore objects at that distance. The LV-MaxSonar®-EZ1™ does not use the calibration data to temperature compensate for range, but instead to compensate for the sensor ringdown pattern. If the temperature, humidity, or applied voltage changes during operation, the sensor may require recalibration to reacquire the ringdown pattern. Unless recalibrated, if the temperature increases, the sensor is more likely to have false close readings. If the temperature decreases, the sensor is more likely to have reduced upclose sensitivity. To recalibrate the LV-MaxSonar®-EZ1™, cycle power. For more complete specifications on the MaxSonar-EZ1, please visit www.maxbotix.com | ||
===Interference=== | |||
Since the beam width is fairly large and sound tends to reflect more than light, sonar sensors will interfere with one another if more than one is active in a sensor array. To avoid interference we recommend that you poll each sensor individually and only activate the specific sensor you are polling. That way you can activate one sensor, read the distance, and then deactivate it before moving to the next sensor. This will give you clean results. Perhaps the easiest way to achieve this is to take the power line from the sensor and connect it to a digital output of your InterfaceKit instead of the normal analog input power pin. This will allow you to toggle the power to the device and turn it on or off at will. | |||
===Formulas=== | ===Formulas=== | ||
The formula to translate SensorValue to Distance is: | The formula to translate SensorValue to Distance is: | ||
<math>Distance (cm) = SensorValue | |||
:<math> | |||
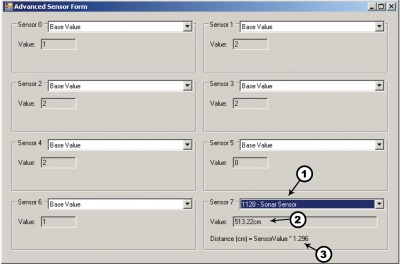
\text{Distance (cm)} = \text{SensorValue} \times 1.296 | |||
</math> | |||
{{UGotherint}} | {{UGotherint}} | ||
{{UGasens}} | {{UGasens}} | ||
==API== | |||
{{SensorAPI}} | |||
==Product History== | ==Product History== | ||
{{UGhist}} | {{UGhist}} | ||
{{UGrow|February 2008 |N/A |N/A |Product Release }} | {{UGrow|February 2008 |N/A |N/A |Product Release }} | ||
Latest revision as of 14:34, 9 May 2018

| |
| Go to this device's product page |
Getting Started
Checking the Contents
|
You should have received:
|
In order to test your new Phidget you will also need:
| |
Soldering the Sensor Cable
|
Solder one end of the sensor cable to the Sonar Sensor. The black wire is soldered to GND, the red wire to +5 and the white wire to AN. Optionally a fourth wire can be soldered to RX in order to turn the sensor on and off from your computer. |
| |
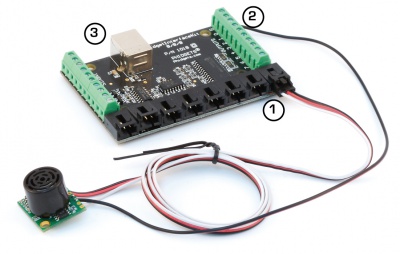
Connecting the Pieces
|
| |
Testing Using Windows 2000 / XP / Vista / 7
Make sure you have the current version of the Phidget library installed on your PC. If you don't, follow these steps:
- Go to the Quick Downloads section on the Windows page
- Download and run the Phidget21 Installer (32-bit, or 64-bit, depending on your system)
- You should see the
 icon on the right hand corner of the Task Bar.
icon on the right hand corner of the Task Bar.
Running Phidgets Sample Program
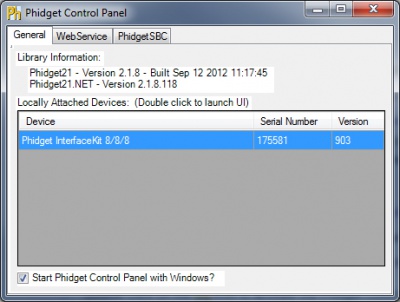
Double clicking on the ![]() icon loads the Phidget Control Panel; we will use this program to ensure that your new Phidget works properly.
icon loads the Phidget Control Panel; we will use this program to ensure that your new Phidget works properly.
The source code for the InterfaceKit-full sample program can be found in the quick downloads section on the C# Language Page. If you'd like to see examples in other languages, you can visit our Languages page.
Updating Device Firmware
If an entry in this list is red, it means the firmware for that device is out of date. Double click on the entry to be given the option of updating the firmware. If you choose not to update the firmware, you can still run the example for that device after refusing.
|
Double Click on the |
| |
| If you are using a 3-wire connection
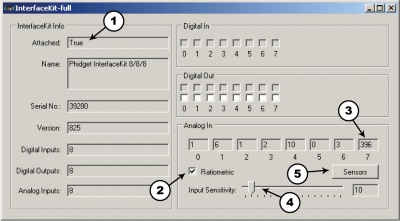
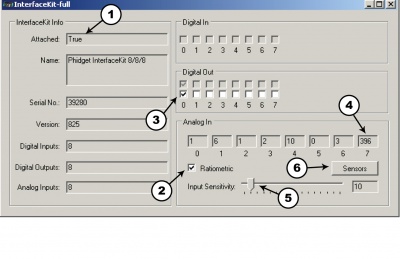
1. Double Click on Phidget InterfaceKit 8/8/8 in the Phidget Control Panel to bring up InterfaceKit-full and check that the box labelled Attached contains the word True. 2. Make sure that the Ratiometric box is Ticked. 3. Move the Sonar Sensor around and point at different objects. The distance is given in the Analog In box. 4. You can adjust the input sensitivity by moving the slider pointer. 5. Click on the Sensors button to bring up the Advanced Sensor Form. |
| |
|
If you are using a 4-wire connection
|
| |
|
|
Testing Using Mac OS X
- Go to the Quick Downloads section on the Mac OS X page
- Download and run the Phidget OS X Installer
- Click on System Preferences >> Phidgets (under Other) to activate the Preference Pane
- Make sure that the is properly attached.
- Double Click on in the Phidget Preference Pane to bring up the Sample program. This program will function in a similar way as the Windows version.
Using Linux
For a step-by-step guide on getting Phidgets running on Linux, check the Linux page.
Using Windows Mobile / CE 5.0 / CE 6.0
For a step-by-step guide on getting Phidgets running on Windows CE, check the Windows CE page.
Technical Details
The Sonar Sensor is manufactured by Maxbotix.com. We have added a sensor cable and instructions on soldering the cable to the sensor. The Sonar Sensor is Ratiometric. Make sure that the ratiometric property is set to TRUE when programming the sensor. Each time after the LV-MaxSonar®-EZ1™ is powered up, it will calibrate during its first read cycle. The sensor uses this stored information to range a close object. It is important that objects not be close to the sensor during this calibration cycle. The best sensitivity is obtained when it is clear for fourteen inches, but good results are common when clear for at least seven inches. If an object is too close during the calibration cycle, the sensor may then ignore objects at that distance. The LV-MaxSonar®-EZ1™ does not use the calibration data to temperature compensate for range, but instead to compensate for the sensor ringdown pattern. If the temperature, humidity, or applied voltage changes during operation, the sensor may require recalibration to reacquire the ringdown pattern. Unless recalibrated, if the temperature increases, the sensor is more likely to have false close readings. If the temperature decreases, the sensor is more likely to have reduced upclose sensitivity. To recalibrate the LV-MaxSonar®-EZ1™, cycle power. For more complete specifications on the MaxSonar-EZ1, please visit www.maxbotix.com
Interference
Since the beam width is fairly large and sound tends to reflect more than light, sonar sensors will interfere with one another if more than one is active in a sensor array. To avoid interference we recommend that you poll each sensor individually and only activate the specific sensor you are polling. That way you can activate one sensor, read the distance, and then deactivate it before moving to the next sensor. This will give you clean results. Perhaps the easiest way to achieve this is to take the power line from the sensor and connect it to a digital output of your InterfaceKit instead of the normal analog input power pin. This will allow you to toggle the power to the device and turn it on or off at will.
Formulas
The formula to translate SensorValue to Distance is:

Other Interfacing Alternatives
If you want maximum accuracy, you can use the RawSensorValue property from the PhidgetInterfaceKit. To adjust a formula, substitute (SensorValue) with (RawSensorValue / 4.095) If the sensor is being interfaced to your own Analog to Digital Converter and not a Phidget device, our formulas can be modified by replacing (SensorValue) with (Vin * 200). It is important to consider the voltage reference and input voltage range of your ADC for full accuracy and range.
|
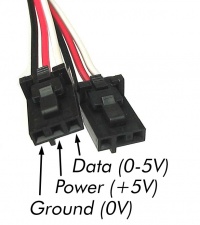
Each Analog Input uses a 3-pin, 0.100 inch pitch locking connector. Pictured here is a plug with the connections labelled. The connectors are commonly available - refer to the Analog Input Primer for manufacturer part numbers. |
| |
API
Phidget analog sensors do not have their own API- they simply output a voltage that is converted to a digital value and accessed through the "Sensor" properties and events on the PhidgetInterfaceKit API. It is not possible to programmatically identify which sensor is attached to the Analog Input. To an InterfaceKit, every sensor looks the same. Your application will need to apply formulas from this manual to the SensorValue (an integer that ranges from 0 to 1000) to convert it into the units of the quantity being measured. For example, this is how you would use a temperature sensor in a C# program:
// set up the interfacekit object
InterfaceKit IFK = new InterfaceKit();
// link the new interfacekit object to the connected board
IFK.open("localhost", 5001);
// Get sensorvalue from analog input zero
int sensorvalue = IFK.sensors[0].Value;
// Convert sensorvalue into temperature in degrees Celsius
double roomtemp = Math.Round(((sensorvalue * 0.22222) - 61.11), 1);
See the PhidgetInterfaceKit User Guide for more information on the API and a description of our architecture.
For more code samples, find your preferred language on the Languages page.
Product History
| Date | Board Revision | Device Version | Comment |
|---|---|---|---|
| February 2008 | N/A | N/A | Product Release |